Robotic Arms
A type normally programmable mechanical arm, similar to the functions of a human arm.
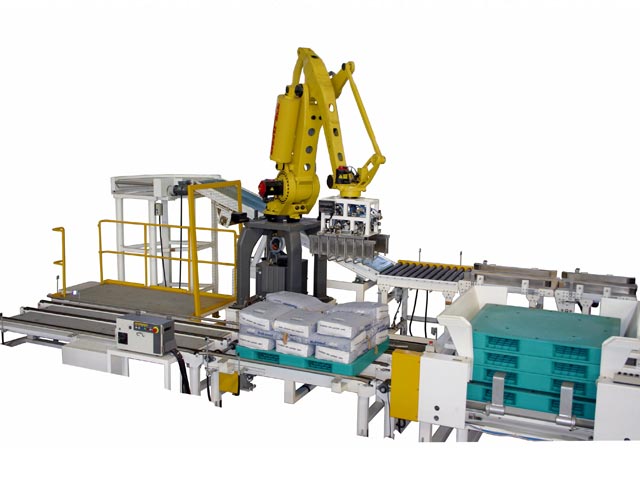

Robotic arms are often used as the "stepping stone" to industrial robotics and automation. Remotely control or program a robotic arm to pick up and manipulate objects at a distance.
A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The terminus of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. However, the term "robotic hand" as a synonym of the robotic arm is often proscribed.